Pilotage des équipes motorisées
Selon la norme NF EN 17206 (UC1/UC2), sans synchronisation et en l’absence de personne sous les charges en mouvement.
Les équipes motorisées sont des dispositifs de levage permettant de fixer des équipements scéniques (décors, écrans, rideaux,…) sur des porteuses depuis le plateau pour ensuite les manœuvrer verticalement.
Toutes nos équipes motorisées sont dotées de dispositifs de sécurité (motoréducteur frein, frein de sécurité, système anti-dégorgement des câbles, détecteurs de fin de course haut et bas, détecteur de surcourse, détecteur de mou de câble, détecteur de surcharge) et sont conformes à la directive machine 2006/42/CE. En option, elles peuvent également être équipées d’un variateur de fréquence (pour la vitesse variable), d’un codeur de position absolu (pour la gestion de l’altimétrie) et d’un peson (pour la lecture de charge).
Le système de pilotage est géré par un automate industriel et commandé par un pupitre mobile de type tablette tactile raccordé à l’automate via un réseau filaire ou hertzien (wifi ou radio), y compris pour les fonctions de sécurité (arrêt d’urgence et commande de validation).
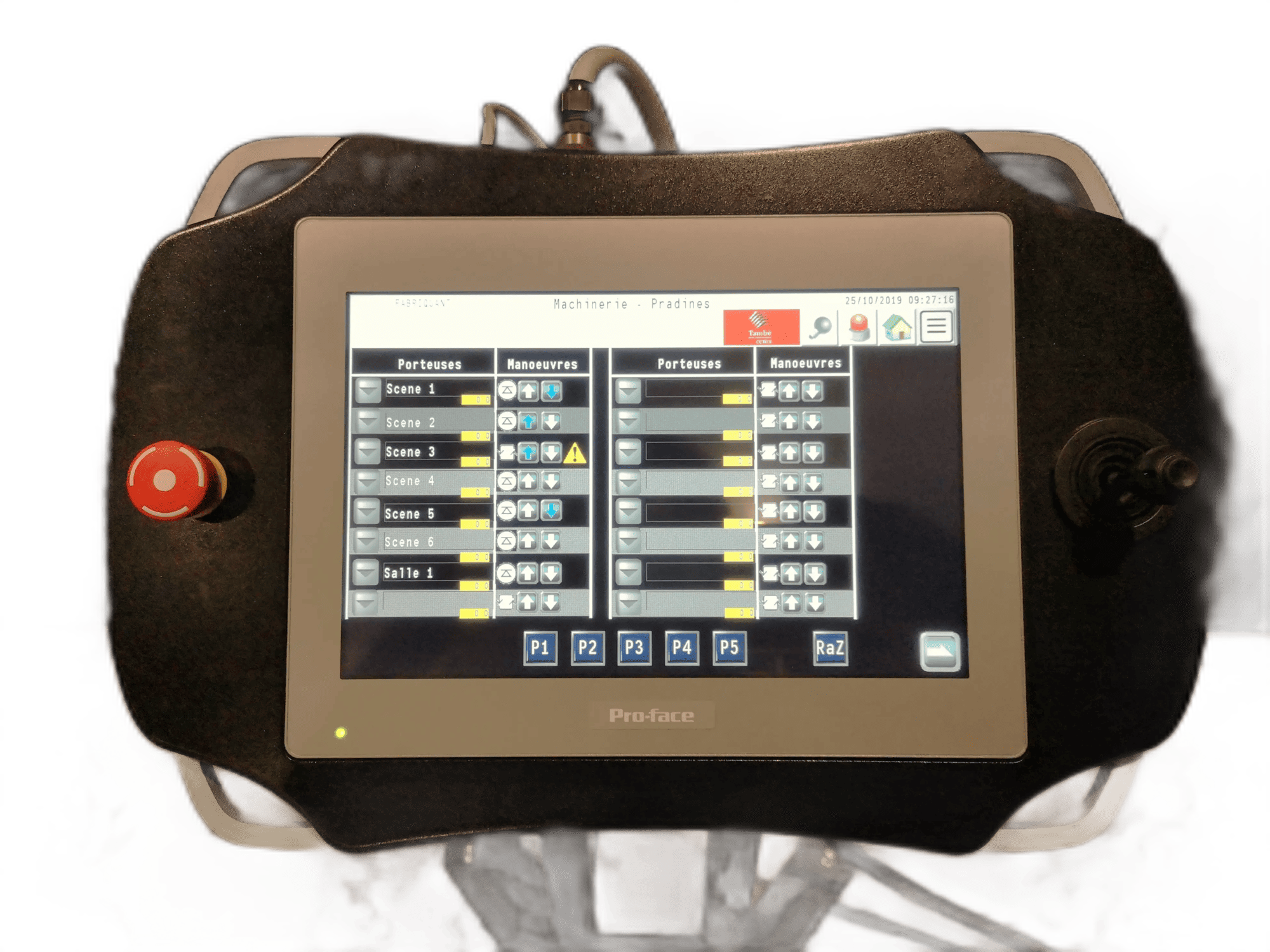
Le pupitre :
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Le pupitre est composé de :
- Un écran tactile de format 10’’ minimum et d’une très haute résolution d’affichage.
- Un bouton de mise en fonctionnement des équipements assurant la fonction « homme mort ».
- Un bouton d’arrêt d’urgence.
Fonctionnalités de base :
- Vitesse fixe maximale de 0.20 m/s.
- Possibilité de groupage des équipes pour départ simultané.
L’interface graphique du pupitre permet de visualiser :
- Pour chaque équipe : les paramètres enregistrés et le mouvement à programmer.
- La condamnation momentanée d’une équipe.
- Les défauts ou messages d’erreur de manipulation.
- Un plan de repérage et l’état des arrêts d’urgence de la salle.
Le système permet de gérer deux types de profil :
- Utilisateur : Pouvant intervenir sur les paramètres modifiables des motorisations.
- Administrateur : Pouvant effectuer toutes les opérations de maintenance, de paramétrage, de mise à jour du logiciel, et accéder au système d’exploitation de l’automate.
La sécurité des mouvements pilotés par le pupitre est garantie par :
- La haute qualité des composants mis en place.
- L’utilisation de dispositifs de sécurité (arrêt d’urgence et « homme mort ) agréés selon la norme européenne NF EN 62061 – SIL3 et mis en œuvre selon les prescriptions de cette même norme (arrêt d’urgence et « homme mort »).
- La gestion des butées des détecteurs de fin de course et de surcourse.
Selon la norme NF EN 17206 (UC3/UC4/UC5), avec synchronisation des équipes et en présence de personnes sous les charges en mouvement.
Les équipes motorisées sont des dispositifs de levage permettant de fixer des équipements scéniques (décors, écrans, rideaux,…) sur des porteuses depuis le plateau pour ensuite les manœuvrer verticalement.
Toutes nos équipes motorisées sont dotées de dispositifs de sécurité (motoréducteur frein, frein de sécurité, système anti-dégorgement des câbles, détecteurs de fin de course haut et bas, détecteur de surcourse, détecteur de mou de câble, détecteur de surcharge) et sont conformes à la directive machine 2006/42/CE. En option, elles peuvent également être équipées d’un variateur de fréquence (pour la vitesse variable), d’un codeur de position absolu (pour la gestion de l’altimétrie) et d’un peson (pour la lecture de charge).
Pour piloter des spectacles avec mouvements en jeu, la sécurité des personnes situées sous les charges en mouvement est assurée par :
- Le niveau de performance de chaque fonction de sécurité qui est déterminé par une analyse de risques dépendant de l’installation et du cas d’utilisation UC3, UC4 ou UC5.
- Le système de pilotage, conforme aux exigences des annexes de la norme NF EN 17206, qui garantit que le niveau de performance requis pour les fonctions de sécurité est atteint (certaines fonctions de sécurité doivent atteindre le niveau de performance SIL3 – Pl e).

Plus concrètement, la sécurité des mouvements pilotés par le système informatique de contrôle et de commande est garantie par :
- Le respect des fonctions et mesures de sécurité recommandées dans la norme NF EN 17206 – Annexe C.
- La gestion des freins, des différents détecteurs et des codeurs.
- La qualité des composants mis en place : l’utilisation d’automates et de dispositifs de sécurité industriels, dont les plus critiques sont agréés selon la norme européenne NF EN 62061 – SIL3 et mis en œuvre selon les prescriptions de cette même norme.
- La redondance de tous les réseaux et organes de commande et de pilotage.
- Le logiciel de pilotage EASY SCENE développé par notre partenaire IAPI.
Point important :
Les fonctions de sécurité sont assurées par des automates et dispositifs industriels standards du marché, ce qui est une garantie de pérennité de la performance de l’installation. En effet, une telle installation, dont la durée de vie peut atteindre 30 ans, doit pouvoir être si nécessaire réparée par une tierce partie. C’est le cas de nos installations, car en cas de défaillance d’un composant de sécurité, le diagnostic, le remplacement et le paramétrage du nouveau composant peuvent être effectués par un automaticien industriel. Ce qui n’est pas le cas des installations mettant en œuvre des cartes d’axes ou autres composants propriétaires pour lesquels seul le fournisseur d’origine sera en mesure d’effectuer toute réparation.
Le système :

{kind=link}
{kind=link}
{kind=link}
{kind=link}
Fonctionnement selon 3 modes :
- Le mode manuel : Ce mode permet la manipulation immédiate d’une équipe ou d’un groupe d’équipes sans programmation. La vitesse variable est commandée manuellement à partir d’un joystick installé sur le pupitre.
- Le mode programmation / exécution : Mode permettant la programmation, la simulation et l’exécution de mouvements ou d’effets. Le retour en mode manuel est possible à tout moment lors du déroulement d’un spectacle programmé.
- Le mode secours : Mode utilisé en cas de panne des éléments de contrôle (poste de commande, boîtiers de contrôle, réseau, …) permettant le pilotage à vue et sommaire des équipements.
Pupitre de commande principal :
Le pupitre principal, filaire, est positionné sur scène. Il intègre deux écrans et deux joysticks paramétrables (assurant également la fonction « homme mort ») pour effectuer les manipulations de base (sélection de motorisations, visualisation, mouvements manuels), enregistrer et restituer les mouvements de la machinerie.
L’interface graphique sur double écran permet de visualiser :
- Sur l’écran principal :
- Une représentation graphique générale en plan et/ou en coupe de tous les axes et permettant de sélectionner les équipes à déplacer ou à programmer.
- L’affichage des groupes et des séquences enregistrés et les modes de déclenchement paramétrés, etc…,
- L’affichage d’une page spécifique pour chaque équipe précisant l’ensemble des paramètres enregistrés (butées altimétriques haute et basse, charge embarquée, différents mouvements enregistrés avec leurs paramètres complets, …).
- La visualisation de la présence d’un défaut.
- Sur le 2nd écran:
- Une représentation graphique générale en coupe permettant la visualisation en temps réel de la position altimétrique et du mouvement de chacune des équipes.
Fonctionnalités :
Le système de pilotage permet de contrôler et commander :
- Des motorisations à vitesse fixe.
- Des motorisations à vitesse variables jusqu’à 2 m/s (vitesse supérieure possible en option).
- Les défauts éventuels de frein, de surcharge, de sous-charge, de variation de vitesse, d’altimétrie, etc.
- L’ensemble des paramètres de mouvement, en permanence et en temps réel.
- Le groupage pour faire fonctionner en simultanéité des équipes à vitesse fixe et variable.
- La synchronisation de mouvements des équipes à vitesse variable, en fonction de l’altimétrie ou du temps de déplacement.
- La définition et la mémorisation des butées d’utilisation (butées logicielles à l’intérieur de la course définie par les butées mécaniques) pour chaque équipe.
- La vitesse maximale pour chacune des équipes. Cette limitation temporaire est liée au type de matériel accroché sur la porteuse ou à la charge embraquée.
- L’inhibition d’une motorisation, action permettant d’interdire temporairement l’utilisation d’une motorisation et d’en interdire sa mise en service inopinée.
- La programmation, l’enregistrement et la restitution des effets de la machinerie scénique :
- Pour chaque motorisation, préparation d’un effet avec côte altimétrique à atteindre, vitesse ou durée du déplacement, accélération et décélération, délai de démarrage par rapport au lancement du mouvement.
- Mémorisation du déplacement d’une ou de plusieurs motorisations et restitution de façon automatique de cet effet.
- Enregistrement d’une suite d’effets pour former une séquence.
- Appel d’un quelconque mouvement enregistré pour exécution.
- Mémorisation de l’ensemble des effets d’un spectacle.
Le système permet de gérer deux types de profil :
- Utilisateur pouvant intervenir sur les paramètres modifiables des motorisations
- Administrateur pouvant effectuer toutes les opérations de maintenance, de paramétrage, de mise à jour du logiciel, et accéder au système d’exploitation de l’automate.
Options :
- Vitesse variable jusqu'à 1.6 m/s.
- Lecture de la charge : L’équipe est dotée d’un peson et d’un dispositif de retour d’information. L’interface graphique permet de visualiser la charge suspendue. En cas de surcharge, le mouvement est bloqué.
- Pilotage de palans à chaine, de treuils ponctuels, d’écrans de projection, de patiences motorisées, …
- Visualisation 3D des équipes et des décors sur le 2nd écran.
- Pupitre de commande auxiliaire : Il fonctionne sur réseau filaire ou hertzien (wifi ou radio). Le pupitre auxiliaire est facilement déplaçable et peut par exemple être mis en place sur une passerelle.
- Pupitre de montage : Le pupitre de montage est mobile et fonctionne sur réseau hertzien (wifi ou radio). Il est principalement destiné aux opérations de montage.
- Pupitre de gril : Le pupitre de gril est un pupitre simplifié permettant la mise en place et le réglage de motorisations ponctuelles sur le gril. Il fonctionne sur réseau hertzien (wifi ou radio).
- Onduleur : Un onduleur de capacité suffisante permet de protéger et sauvegarder l’installation informatique (automate et pupitres).